agent 代码解析
agent 可以作为 guest init 进程启动,也可以使用 systemd 等作为 init ,agent 作为普通进程启动。在这篇文章中,我们将以 agent 作为普通服务/进程启动,使用 systemd 作为 init 系统为例进行说明。
agent 项目又分为如下几个 crate:
- agent:代码位置 src/agent,即 agent 代码的根。
- rustjail: 类似 golang 中的 libcontainer 的角色。代码位置 src/agent/rustjail
- protocols:主要定义了 runtim <-> agent 之间的通信协议。代码位置 src/agent/protocols
- oci:主要是定义了 OCI 相关 spec 的数据结构。代码位置 src/agent/oci
agent 进程
agent 的启动代码见 main.rs 的 main 函数即可。
agent 程序有两个作用:
- ttrpc服务:作为 agent 服务,通过 ttrpc 响应来自 shim 进程的请求
- 启动容器:启动容器时,agent 会通过运行 agent 二进制在新的进程中启动容器
启动 ttrpc 服务
main 函数会判断命令行参数,如果第一个参数是 init,表示是要启动一个新的容器;否则表示要启动 ttrpc 服务:
fn main() -> std::result::Result<(), Box<dyn std::error::Error>> {
let args: Vec<String> = env::args().collect();
// 如果是 kata-agent init,则准备进入创建容器的步骤
if args.len() == 2 && args[1] == "init" {
rustjail::container::init_child();
exit(0);
}
let rt = tokio::runtime::Builder::new_multi_thread()
.enable_all()
.build()?;
// 在 real_main 里启动 ttrpc 服务。
rt.block_on(real_main())
}
我们可以看到, 启动 agent 服务代码在 real_main 函数中。
TODO
启动容器流程
这里我们来看一下创建并启动一个容器的流程。
启动一个容器包括两个 rpc call:
- create_container
- start_container
这两个 rpc call 的入口都在 rpc.rs 中,而实际工作代码,都是在 do_create_container 和 do_start_container 这两个函数中实现的。
create_container/do_create_container
do_create_container 中主要有如下操作:
- rescan_pci_bus:查找新设备
- add_devices:更新设备列表,让 OCI spec 中的配置和 guest 中的设备同步
- add_storages: mount 设备/volume
- update_container_namespaces:更新 OCI spec 中的 namespace
- update_device_cgroup:更新 device cgroup
- append_guest_hooks
- setup_bundle:创建、设置容器的 bundle 目录,创建 config.json 文件。
在上面这些准备工作完成之后,下面的代码会创建容器:
let mut ctr: LinuxContainer =
LinuxContainer::new(cid.as_str(), CONTAINER_BASE, opts, &sl!())?;
let p = if oci.process.is_some() {
Process::new(
&sl!(),
&oci.process.as_ref().unwrap(),
cid.as_str(),
true,
pipe_size,
)?
} else {
return Err(anyhow!(nix::Error::from_errno(nix::errno::Errno::EINVAL)));
};
ctr.start(p).await?;
也即创建一个 LinuxContainer 类型的结构 ctr ,为 ctr 设置 Process 属性,也就是容器要运行的进程,然后调用 ctr.start(p) 来“启动”容器。这里虽然使用了 start 作为函数名,实际上容器的进程还没有真正的启动。在介绍容器真正的启动代码之前,我们先来看看 ctr.start(p) 方法都干了什么。
ctr.start(p)
这里 ctr 是一个 LinuxContainer 类型的结构体,也是 Kata agent 中容器的实现,p 为一个进程,也就是容器的进程。
agent 创建容器进程的时候,会先启动 kata-agent 进程:
let exec_path = std::env::current_exe()?;
let mut child = std::process::Command::new(exec_path);
let mut child = child
.arg("init")
.stdin(child_stdin)
.stdout(child_stdout)
.stderr(child_stderr)
.env(INIT, format!("{}", p.init))
.env(NO_PIVOT, format!("{}", self.config.no_pivot_root))
.env(CRFD_FD, format!("{}", crfd))
.env(CWFD_FD, format!("{}", cwfd))
.env(CLOG_FD, format!("{}", cfd_log));
if p.init {
child = child.env(FIFO_FD, format!("{}", fifofd));
}
child.spawn()?;
这个进程就是 Kata agent 进程本身,设置了 init 参数,这样 agent 启动的时候会去创建容器进程。其余 CRFD_FD/CWFD_FD 用于父(agent)子(容器)进程之间同步。
上面代码有两点需要说明一下:
p.init: Process 的 init 属性,如果是 true,表示启动的是容器的进程,如果是 false 表示是 exec RPC 启动的普通进程,这两种进程处理有区别。- FIFO_FD 是容器 bundle 下的一个名为
exec.fifo的文件,这个文件用于控制容器进程的启动。
这样“容器进程”就启动了,下面就是获取容器进程的 pid:
let pid_buf = read_async(&mut pipe_r).await?;
let pid_str = std::str::from_utf8(&pid_buf).context("get pid string")?;
let pid = match pid_str.parse::<i32>() {
Ok(i) => i,
Err(e) => {
}
};
可以看出,这个 pid 不是通过函数调用直接得到的,而是通过 pipe_r 读出来的。
let (prfd, cwfd) = unistd::pipe().context("failed to create pipe")?;
let (crfd, pwfd) = unistd::pipe().context("failed to create pipe")?;
let mut pipe_r = PipeStream::from_fd(prfd);
let mut pipe_w = PipeStream::from_fd(pwfd);
这个 pipe_r 的另一端,就是传递给容器进程的 cwfd。在容器进程启动的时候,也是经过了一次 fork 操作在子进程中运行容器进程。
ctr.start() 最后执行的一个比较重要的函数就是 join_namespaces 了,在这个函数中,会创建、启动真正容器进程。而真正的进程管理工作,则是在新启动的子 kata-agent 进程中实现的。也就是下面要介绍的 do_init_child 函数。
do_init_child
do_init_child 是 kata-agent 进程启动后,创建真正容器进程的处理函数。do_init_child 和 kata-agent 进程通过 cwfd/crfd 这对分别用于写入和读取的 fd 来通信(同步)。
// kata-containers/src/agent/rustjail/src/container.rs
fn do_init_child(cwfd: RawFd) -> Result<()> {
match fork() {
Ok(ForkResult::Parent { child, .. }) => {
let _ = write_sync(cwfd, SYNC_DATA, format!("{}", pid_t::from(child)).as_str());
// parent return
return Ok(());
}
Ok(ForkResult::Child) => (),
Err(e) => {
}
}
}
我们可以看到,kata-agent 带 init 参数启动后,会 fork 一次,创建的子进程才是容器进程真正执行的进程(实际也是通过 execvp 启动的)。fork 成功时,父进程会把子进程的 pid 写到 cwfd 中,这样 kata-agent 进程就获得了容器的真实 pid 。
主 kata-agent 进程的 join_namespaces 函数和新创建的 kata-agent 子进程通过文件句柄来同步容器的创建过程,比如让父进程发送容器 spec 给子进程,子进程通知父进程执行 hook 等。
do_init_child 函数最后部分代码如下:
if init {
if init {
fifofd = std::env::var(FIFO_FD)?.parse::<i32>().unwrap();
}
... ...
let fd = fcntl::open(
format!("/proc/self/fd/{}", fifofd).as_str(),
OFlag::O_RDONLY | OFlag::O_CLOEXEC,
Mode::from_bits_truncate(0),
)?;
unistd::close(fifofd)?;
let mut buf: &mut [u8] = &mut [0];
unistd::read(fd, &mut buf)?;
}
do_exec(&args);
我们看到,如果启动的时候带有 init 参数,也就是容器进程,则会去读取 exec.fifo 文件。
这时候,kata-agent 子进程会 block 住,容器进程还没有真正启动。 直到下一个 rpc start_container 请求过来。
start_container/do_start_container
start_container 最终会执行到这个函数:
// kata-containers/src/agent/rustjail/src/container.rs
fn exec(&mut self) -> Result<()> {
let fifo = format!("{}/{}", &self.root, EXEC_FIFO_FILENAME);
let fd = fcntl::open(fifo.as_str(), OFlag::O_WRONLY, Mode::from_bits_truncate(0))?;
let data: &[u8] = &[0];
unistd::write(fd, &data)?;
info!(self.logger, "container started");
self.init_process_start_time = SystemTime::now()
.duration_since(SystemTime::UNIX_EPOCH)
.unwrap()
.as_secs();
self.status.transition(ContainerState::RUNNING);
unistd::close(fd)?;
Ok(())
}
我们可以看到,exec 函数不复杂,核心逻辑是往 exec.fifo 文件里写了点数据而已。这时,我们在上面看到的 do_init_child 函数中 block 在读取 exec.fifo 的地方就会继续执行,然后执行后面的 do_exec 方法:
fn do_exec(args: &[String]) -> ! {
let path = &args[0];
let p = CString::new(path.to_string()).unwrap();
let sa: Vec<CString> = args
.iter()
.map(|s| CString::new(s.to_string()).unwrap_or_default())
.collect();
let a: Vec<&CStr> = sa.iter().map(|s| s.as_c_str()).collect();
let _ = unistd::execvp(p.as_c_str(), a.as_slice()).map_err(|e| match e {
nix::Error::Sys(errno) => {
std::process::exit(errno as i32);
}
_ => std::process::exit(-2),
});
unreachable!()
}
我们可以看到,这里才真正通过 execvp 系统调用启动了容器中指定的进程。
启动容器小结
通过上面的分析,我们看到启动一个容器的流程大致如下图所示(这里并非是函数的调用关系,而是进程之间的关系):
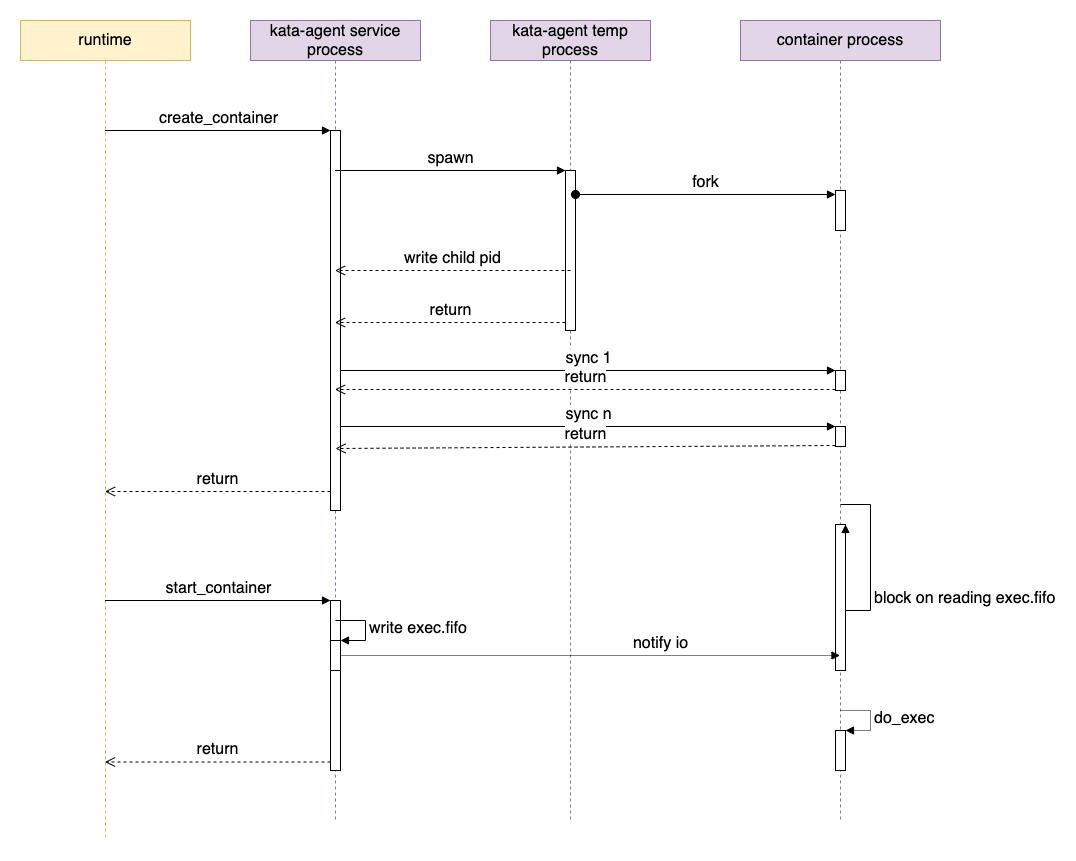
总结来说就是:
- create_container
- kata-agent service 运行
kata-agent init启动容器临时进程 - 容器临时进程 fork(),父进程退出,将子进程的 pid 写回给 kata-agent service 进程
- 容器临时进程子进程准备容器运行环境,block 在读取
exec.fifo上
- kata-agent service 运行
- start_container
- kata-agent service 向容器的
exec.fifo文件中写入数据 - 容器临时进程子进程继续执行,通过 execvp 启动容器的真实进程
- kata-agent service 向容器的
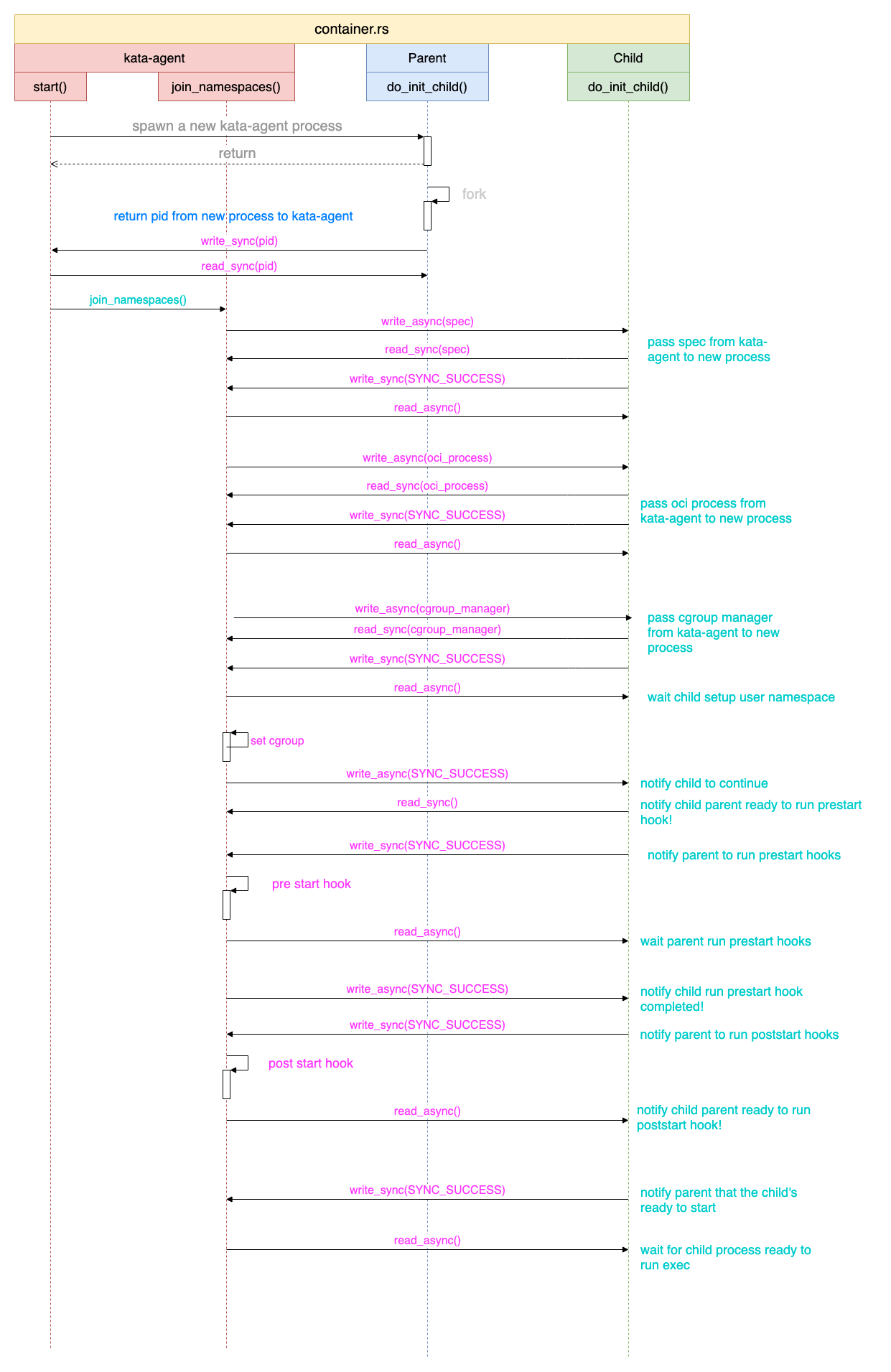
子进程和 kata-agent 之间的数据同步也是理解 agent 代码的关键,两个进程间通过(管道)文件句柄来互相同步,比如让父进程执行hook等操作。下面的图是两者之间主要的同步内容和流程: