Runtime 代码解析
runtime 为运行在宿主机上的、支持 shim v2 协议的进程。在这系列文章中,多数情况下可以将 runtime 、shimv2 视为同一内容。
Runtime 概要
Runtime 大致架构如下图所示:
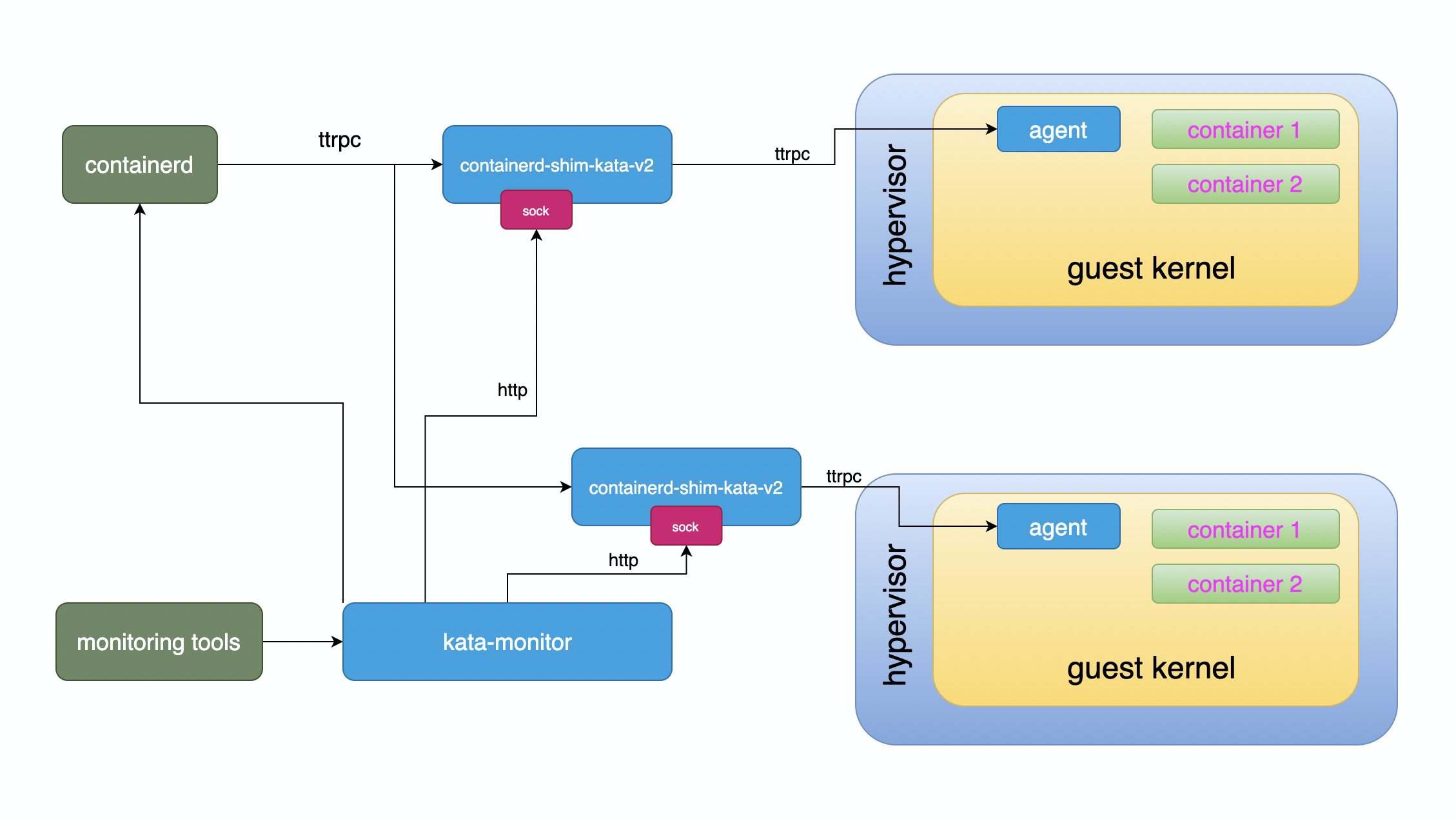
整个 Runtime ,其可执行程序为 containerd-shim-kata-v2,也即 shim 进程,这也是 Kata Containers 的入口点。Runtime 对上接受 containerd 的请求(通过 shimv2 “协议”),对 guest 来说,通过 guest 内的 agent 来控制 guest 内容器的创建、删除等管理。
Runtime 和 agent 之间的采用了 ttrpc 协议通信,这是一个使用了 protocol buffer 编解码方式的类似 gRPC 的通信方式。该协议由 containerd 创建,用于 containerd 和底层 runtime 之间的通信。在 Kata Containers 中, runtime 和 agent 也通过 ttrpc 通信。
Packages 介绍
Runtime 代码在 src/runtime 下,主要由如下几个 package
cli
这个包下主要定义了各个构建出来的二进制可执行文件的 main 函数,有如下几个:
containerd-shim-kata-v2kata-runtimekata-monitor
containerd-shim-v2
这个包是实现了 shim v2 协议的 ttrpc server 的入口,具体容器、sandbox 的操作,则使用了 pkg 和 virtcontainers 两个包下的实现。
Shim v2 实现文件入口在 src/runtime/containerd-shim-v2/service.go 中。这个文件定义了 service struct ,该结构实现了 shim v2 协议要求的接口(为方便阅读删除了部分属性):
type service struct {
// hypervisor pid, Since this shimv2 cannot get the container processes pid from VM,
// thus for the returned values needed pid, just return the hypervisor's
// pid directly.
hpid uint32
// shim's pid
pid uint32
sandbox vc.VCSandbox
containers map[string]*container
config *oci.RuntimeConfig
events chan interface{}
monitor chan error
id string
}
在这个结构中,主要的是 sandbox 和 containeres 属性。 sandbox 指向一个 vc.VCSandbox 接口实例, containers 是一个容器列表,很多 shimv2 接口都是对容器的操作,都会使用到这个结构。monitor 用于监控 sandbox 是否在运行中。
Shimv2 要求的接口如下:
type Shim interface {
shimapi.TaskService
Cleanup(ctx context.Context) (*shimapi.DeleteResponse, error)
StartShim(ctx context.Context, id, containerdBinary, containerdAddress string) (string, error)
}
type TaskService interface {
State(ctx context.Context, req *StateRequest) (*StateResponse, error)
Create(ctx context.Context, req *CreateTaskRequest) (*CreateTaskResponse, error)
Start(ctx context.Context, req *StartRequest) (*StartResponse, error)
Delete(ctx context.Context, req *DeleteRequest) (*DeleteResponse, error)
Pids(ctx context.Context, req *PidsRequest) (*PidsResponse, error)
Pause(ctx context.Context, req *PauseRequest) (*google_protobuf1.Empty, error)
Resume(ctx context.Context, req *ResumeRequest) (*google_protobuf1.Empty, error)
Checkpoint(ctx context.Context, req *CheckpointTaskRequest) (*google_protobuf1.Empty, error)
Kill(ctx context.Context, req *KillRequest) (*google_protobuf1.Empty, error)
Exec(ctx context.Context, req *ExecProcessRequest) (*google_protobuf1.Empty, error)
ResizePty(ctx context.Context, req *ResizePtyRequest) (*google_protobuf1.Empty, error)
CloseIO(ctx context.Context, req *CloseIORequest) (*google_protobuf1.Empty, error)
Update(ctx context.Context, req *UpdateTaskRequest) (*google_protobuf1.Empty, error)
Wait(ctx context.Context, req *WaitRequest) (*WaitResponse, error)
Stats(ctx context.Context, req *StatsRequest) (*StatsResponse, error)
Connect(ctx context.Context, req *ConnectRequest) (*ConnectResponse, error)
Shutdown(ctx context.Context, req *ShutdownRequest) (*google_protobuf1.Empty, error)
}
可以看到 shimv2 接口实际上是没有“容器”类型资源的接口的,只是“Task”类型的资源,所以 ctr 命令也是使用了 ctr container 好 ctr task 两个子命令来分别处理容器和 task:容器是一组静态资源,只有真正启动(运行)后,才能成为 Task ,也就是进程。
Cleanup 会有清理 task(这时候 shimv2 进程可能因为意外退出了,所以不能通过 shimv2 的 ttrpc 链接来执行操作)
StartShim 用于启动一个 shimv2 进程。
shim v2 启动过程
shimv2 启动的时候,实际上是启动了两次 shim v2 进程。
containerd 会调用 StartShim 函数启动 shimv2 进程。实际启动 shimv2 进程的方法 containerd 已经封装好了,Kata Containers 只需要按照 containerd 包的规则实现指定的 New 方法以及 shimv2 要求的接口即可。
这个启动方法大致如下:
// src/runtime/vendor/github.com/containerd/containerd/runtime/v2/shim/shim.go
service, err := initFunc(ctx, idFlag, publisher)
switch action {
case "delete":
response, err := service.Cleanup(ctx)
// ...
case "start":
address, err := service.StartShim(ctx, idFlag, containerdBinaryFlag, addressFlag)
if err != nil {
return err
}
if _, err := os.Stdout.WriteString(address); err != nil {
return err
}
return nil
default:
// ...
client := NewShimClient(ctx, service, signals)
return client.Serve()
}
我们可以看到, shimv2 进程可以接收 “3” 个参数:
- "start":启动 shimv2 进程
- "delete":删除容器
- "": 启动 shimv2 ttrpc service
启动一个 shimv2 进程,实际上 containerd-shim-kata-v2 是运行了两次,如下图所示:
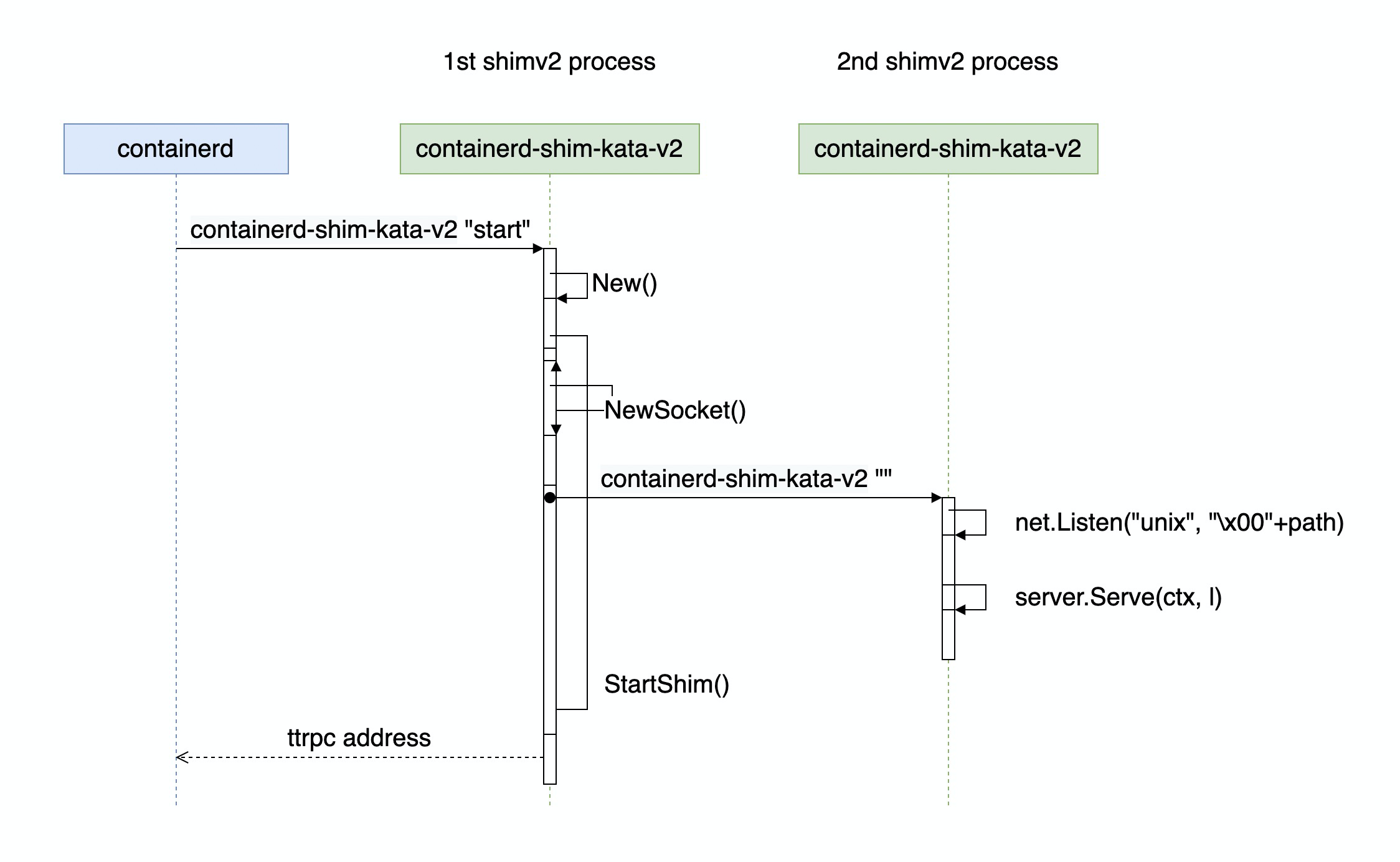
第一次启动是由 containerd 发起,第一个参数是 start ,这时候启动参数包括:
-namespace:容器的 namespace-address: containerd 服务的监听地址-publish-binary: containerd 发布事件的二进制程序路径。-id:容器ID
在 start 中,shimv2 会创建一个监听 ttrpc 的 socket 地址,然后在该进程中再启动一个 shimv2 进程。第二个 shimv2 进程启动时使用 golang 的 exec.Start() 系统函数,启动进程但是不等待进程结束。
第二个启动的shimv2进程也不带参数(但是带 commandline options,即 -- 开头的命令行选项),这对应上面代码中 switch 的 default 的处理分支,即:
client := NewShimClient(ctx, service, signals)
return client.Serve()
也就是说,第二个启动 shim v2 会长时间运行下去,作为 ttrpc server,提供 shimv2 的 API 。
ttrpc 监听地址是一个特殊类型的 unix socket,名为 abstract unix socket,用 netstat --protocol unix 查看的话,这类 socket 地址前面会有一个 @ 符号。这个 socket 是在第一个 shimv2 打开的,文件描述符会传递给子进程,即第二个 shimv2 进程,在第二个 shimv2 进程中,会使用下面的方法来获取这个 socket 地址作为 ttrpc 的服务监听地址:
// src/runtime/vendor/github.com/containerd/containerd/runtime/v2/shim/shim_unix.go
func serveListener(path string) (net.Listener, error) {
if path == "" {
l, err = net.FileListener(os.NewFile(3, "socket"))
path = "[inherited from parent]"
} else {
if len(path) > 106 {
return nil, errors.Errorf("%q: unix socket path too long (> 106)", path)
}
l, err = net.Listen("unix", "\x00"+path)
}
return l, nil
}
在 containerd 的当前实现中,并没有通过命令行参数传递这个 socket 地址,所以 使用了 os.NewFile(3, "socket") 这种方式获取从父进程传递过来的文件描述符:
父进程(第一个 shimv2 进程):
cmd, err := newCommand(ctx, containerdBinary, id, containerdAddress)
socket, err := cdshim.NewSocket(address)
f, err := socket.File()
cmd.ExtraFiles = append(cmd.ExtraFiles, f)
子进程(第二个 shimv2 进程):
l, err = net.FileListener(os.NewFile(3, "socket"))
第一个 shimv2 进程,会将 ttrpc 监听地址写入到标准输出,返回给 containerd 使用。
Note: containerd 有一些 task 事件是通过 shimv2 进程调用 containerd 程序来发送给 containerd 的,而不是通过网络连接或者 API ,所以 shimv2 启动选项中有 publish-binary 。
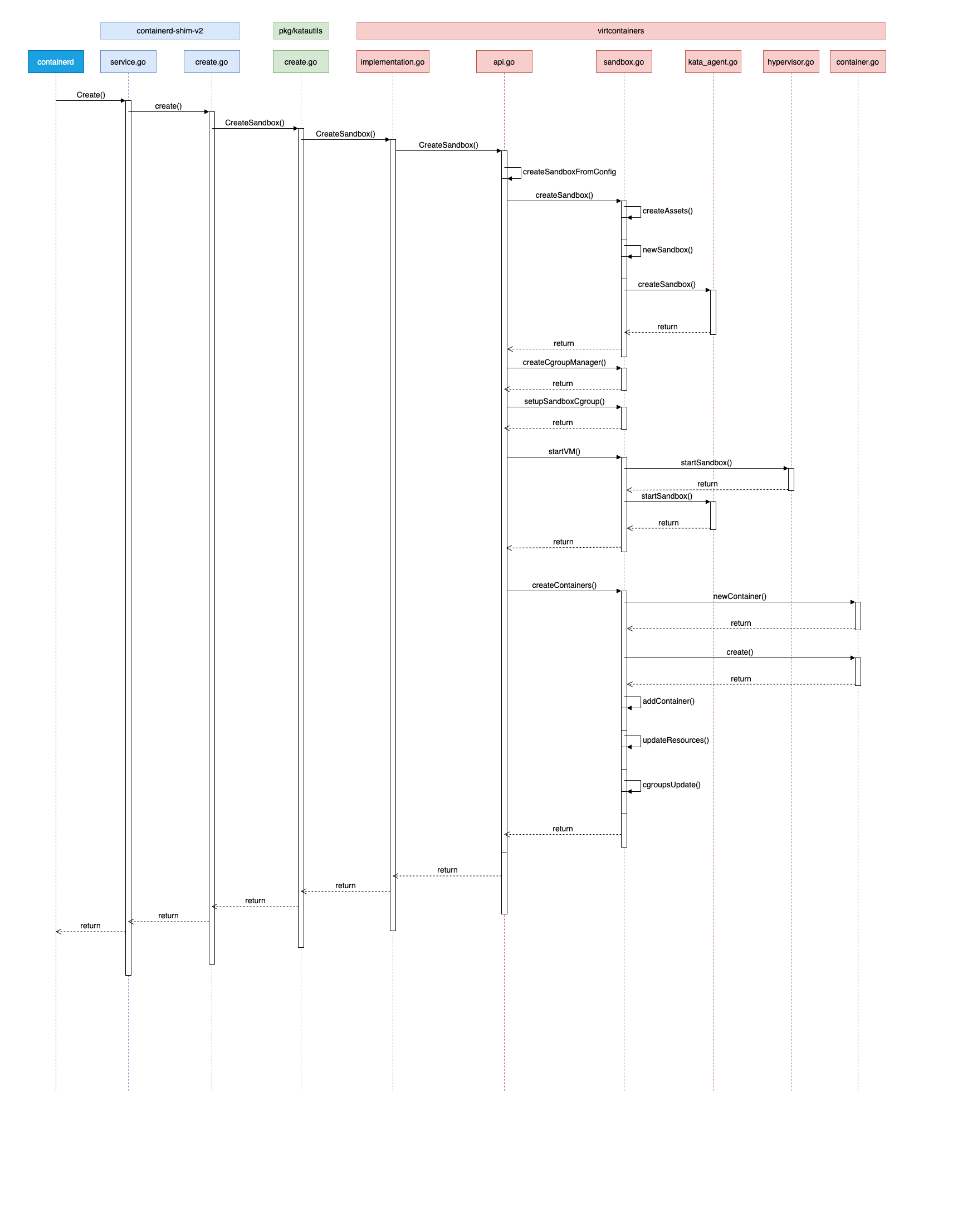
CreateContainer
- containerd 通过 shimv2 的 Create() 接口创建 task(containerd-shim-v2/service.go)
- Create() 调用 create() 方法(containerd-shim-v2/create.go)
- 根据 containerType:
- PodSandbox:创建 sandbox 容器,如果是 cri 的话,即 pause 容器。
- katautils.CreateSandbox()(pkg/katautils/create.go)
- VCImpl.CreateSandbox()(virtcontainers/implementation.go)
- CreateSandbox()(virtcontainers/api.go)
- createSandboxFromConfig()(virtcontainers/api.go)
- s := createSandbox()(virtcontainers/sandbox.go)
- s.createNetwork()(virtcontainers/sandbox.go)
- s.startVM()(virtcontainers/sandbox.go)
- s.createContainers()(virtcontainers/sandbox.go)
- createSandboxFromConfig()(virtcontainers/api.go)
- CreateSandbox()(virtcontainers/api.go)
- VCImpl.CreateSandbox()(virtcontainers/implementation.go)
- katautils.CreateSandbox()(pkg/katautils/create.go)
- PodContainer:创建普通业务容器,即用户真正的用于工作的容器。
- katautils.CreateContainer()(pkg/katautils/create.go)
- sandbox.CreateContainer()(virtcontainers/sandbox.go)
- katautils.CreateContainer()(pkg/katautils/create.go)
- PodSandbox:创建 sandbox 容器,如果是 cri 的话,即 pause 容器。
更复杂的可以参考下面这个图,这个图显示的是创建 PodSandbox 时候的流程。由于是 sandbox 容器,因此虚拟机是在这个步骤中创建的。
其中下面这 Sandbox 结构体的这两个属性需要注意一下,即:
// virtcontainers/sandbox.go
type Sandbox struct {
config *SandboxConfig
containers map[string]*v
}
type SandboxConfig struct {
// Containers describe the list of containers within a Sandbox.
// This list can be empty and populated by adding containers
// to the Sandbox a posteriori.
//TODO: this should be a map to avoid duplicated containers
Containers []ContainerConfig
}
// virtcontainers/container.go
type Container struct {
config *ContainerConfig
}
type ContainerConfig struct {
}
Sandbox 结构体保存了两个关于容器的结构: SandboxConfig 和 Container(定义在 container.go 里)。这两个既要区分清楚,也不能忘记数据的同步,因为 SandboxConfig 里保存的 ContainerConfig 并非指针,而是一个复制对象,而 Container 保存的则是一个指针。
virtcontainers
这里是 Kata Containers 中的核心实现代码,主要是通过对 hypervisor 和 guest 的管理,实现标准的容器操作接口。
pkg
包括了一些基本的帮助函数。
到底 runtime 名字怎么写?
在 K8s 和 containerd 中,我们会看到很多用于设置 runtime 的地方,比如 RuntimeClass 、Pod 的 runtimeClassName 定义,以及 ctr run --runtime io.containerd.run.kata.v2 和 crictl runp -r kata ,里面都有参数指定运行时的名字。
runtime 的名字和可执行程序之间的名字是有一个对应关系的,这样 containerd 这样的高级 runtime 就能找到 shimv2 二进制并启动 shimv2 进程。
其解析过程大致如下:
- Pod 的
runtimeClassName属性会查找同名的RuntimeClass资源 - 根据 该资源的 handler ,在 containerd 的配置文件查找相应的运行时( [plugins.cri.containerd.runtimes.${HANDLER_NAME}] )。
一般情况下 containerd 配置会像这样:
[plugins.cri.containerd.runtimes.kata]
runtime_type = "io.containerd.kata.v2"
从上面不难看出另外两个结论:
- ctr 命令使用的是 containerd 配置文件中的
runtime_type属性( containerd 用)。 - crictl 和 K8s(实际也是 CRI 接口) 使用的是 containerd 配置中的 HANDLER_NAME( CRI 用)。
默认情况下,containerd 会根据 runtime_type 按规则对应到具体的运行时的可执行文件名。比如 Kata Containers 运行时最终会转换为 containerd-shim-kata-v2 命令,该命令默认安装在 /usr/local/bin/containerd-shim-kata-v2 。
具体 containerd 的转换规则可以参考这里的说明。